ዝርዝር ሁኔታ:
")
ቪዲዮ: የበይነመረብ ፍጥነት መለኪያ 4 ደረጃዎች (ከስዕሎች ጋር)
")
2024 ደራሲ ደራሲ: John Day | [email protected]. ለመጨረሻ ጊዜ የተሻሻለው: 2024-01-30 07:33



አጠቃላይ እይታ
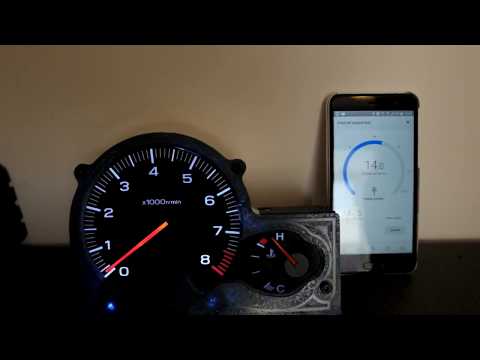
ይህ “የበይነመረብ ፍጥነት መለኪያ” የአውታረ መረብ አጠቃቀምዎን በእውነተኛ ጊዜ ቁጥጥር አቅራቢያ ይሰጥዎታል። ይህ መረጃ በአብዛኛዎቹ የቤት ራውተሮች ድር በይነገጽ ላይ ይገኛል። ሆኖም እሱን ለማግኘት እሱን ለመመልከት የአሁኑን ሥራዎን ማቆም ያስፈልግዎታል።
የአሁኑን ሥራዬን ሳላቋርጥ ፣ በፍጥነት በጨረፍታ ለመረዳት በሚያስችል ቅርጸት ለማሳየት እና መረጃውን በተቻለ መጠን ከብዙ ራውተሮች ጋር በሚሠራበት መንገድ መረጃውን ለማግኘት ፣ ሌሎች ሌሎችም እንዲችሉ ለማድረግ ፈልጌ ነበር። ሊጠቀሙበት ይችላሉ።
ነገሮችን እንዴት እንደሚያደርግ
መረጃውን ከ ራውተር ለማግኘት እንደ SNMP (ቀላል የአውታረ መረብ አስተዳደር ፕሮቶኮል) ወሰንኩ። SNMP በአውታረ መረብ መሣሪያዎች ውስጥ በሰፊው ጥቅም ላይ ውሏል እና መሣሪያዎ በነባሪ ካልደገፈው DDWRT (ክፍት ምንጭ ራውተር firmware) SNMP ን ለመተግበር ሊያገለግል ይችላል።
መረጃውን በቀላሉ ለመረዳት በሚያስችል መንገድ ለማሳየት ከመኪና ውስጥ መለኪያ ተጠቅሜአለሁ። የአውቶሞቲቭ መለኪያዎች ትኩረታቸውን ሳይከፋፍሉ ወይም ግራ ሳይጋቡ መረጃን ለእርስዎ ለመስጠት የተነደፉ ናቸው ፣ ስለዚህ ነጅው ዓይኖቻቸውን በመንገድ ላይ እንዲይዙ ያደርጋቸዋል። ደግሞም ፣ በዙሪያዬ የተወሰነ አቀማመጥ ነበረኝ።
ይህ በጠረጴዛዬ ላይ ስለሚሆን የኮምፒተር መለዋወጫዎች ሁሉ አርጂቢ መሆን አለባቸው ምክንያቱም እኔ ደግሞ የኋላውን ብርሃን አርጂቢ ለማድረግ እወስናለሁ። ቀኝ?
ተግዳሮቶች
ያገኘኋቸው መለኪያዎች የአየር-ኮር አንቀሳቃሹን ይጠቀማሉ። ከዚህ ፕሮጀክት በፊት ስለእነዚህ አልሰማሁም።
ከ Wikipedia የመርፌ ዘንግ ወደ ክፍሉ ውስጥ ይወጣል ፣ እዚያም ቋሚ ማግኔት ወደ ዘንግ ይለጠፋል። የአሁኑ በ perpendicular coils ውስጥ ሲፈስ ፣ መግነጢሳዊ መስኮቻቸው ከመጠን በላይ ያስገባሉ ፣ እና ማግኔቱ ከተዋሃዱ መስኮች ጋር ለመስማማት ነፃ ነው።
በአስተዳዳሪው ውቅር ውስጥ SNMP ን የሚደግፍ ለአርዱዲኖ ቤተ -መጽሐፍት ማግኘት አልቻልኩም። SNMP ሁለት ዋና ቅጾች አሉት ፣ ወኪል እና ሥራ አስኪያጅ። ወኪሎች ለጥያቄው ምላሽ ይሰጣሉ እና አስተዳዳሪዎች ጥያቄዎችን ወደ ወኪሎች ይልካሉ። በ 0neblock የተፈጠረውን የ Arduino_SNMP ቤተ -መጽሐፍትን በማሻሻል ሥራ አስኪያጅ ተግባሩን ማግኘት ችያለሁ። በ ‹አር ++› ውስጥ የ LED ን ብልጭታ ከማድረግ በስተቀር በ C ++ ውስጥ በጭራሽ አላውቅም ስለዚህ በ SNMP ቤተ -መጽሐፍት ላይ ችግሮች ካሉ ያሳውቁኝ እና እነሱን ለማስተካከል እሞክራለሁ ፣ አሁን ግን እየሰራ ነው።
በተጨማሪም ፣ SNMP ለእውነተኛ ጊዜ እይታ የተነደፈ አይደለም። የታቀደው አጠቃቀም ስታቲስቲክስን ለመከታተል እና መቋረጥን ለመለየት ነው። በዚህ ምክንያት በራውተሩ ላይ ያለው መረጃ በየ 5 ሰከንዶች ብቻ ይዘምናል (መሣሪያዎ ሊለያይ ይችላል)። በፍጥነት ሙከራው እና በሚንቀሳቀስ መርፌ ላይ ባለው ቁጥር መካከል ያለው መዘግየት ምክንያት ይህ ነው።
ደረጃ 1 መሣሪያዎች እና ቁሳቁሶች





3 ሙሉ ኤች-ድልድዮች ያስፈልጉናል። የተጠቀምኳቸው ሞዴሎች Dual TB6612FNG እና Dual L298N ናቸው።
እያንዳንዱ የአየር-ኮር አንቀሳቃሹ 2 ሙሉ ኤች ድልድዮችን ይፈልጋል ፣ ምክንያቱም ጠመዝማዛዎቹ በተናጥል ቁጥጥር ያስፈልጋቸዋል።
እኔ እየተጠቀምኩ ካሉት መለኪያዎች መካከል አንዱ በዲያዶድ እና በተከላካይ አንድ ኮይል ወደ መሬት አጠረ። ከእሱ በስተጀርባ ያለውን ሳይንስ እርግጠኛ አይደለሁም ግን ያንን ማድረጉ በአንድ ሽቦ ብቻ በተጎላበተ ወደ 90 ዲግሪዎች እንዲሽከረከር ያስችለዋል።
እኔ ESP32 ን ለማብራት የመረጥኩት የ L298N ቦርድ አካል የሆነውን የ 12 ቮ እስከ 5 ቮ ተቆጣጣሪ እጠቀማለሁ።
ሁሉም የ LED ወረዳዎች እንደ አማራጭ ፣ እንዲሁም የ JST አያያorsች ናቸው። ሽቦዎቹን በቀጥታ ለ ESP32 እና ለሞተር ሾፌር በቀላሉ መሸጥ ይችላሉ።
ደረጃ 3 የኮድ ንድፍ
የኮድ ማዋቀር
የ ESP32 ሰሌዳውን ለመጠቀም እንዲቻል አርዱዲኖን ማዋቀር አለብን። በ ESP32 አርዱinoኖ ቅንብር ውስጥ እርስዎን የሚሄድ ጥሩ መመሪያ እዚህ አለ።
እንዲሁም እዚህ የሚገኝ የአርዲኖ_ኤስኤንኤም ቤተ -መጽሐፍት ያስፈልግዎታል።
ኮዱን ለማዋቀር የተወሰነ መረጃ መሰብሰብ ያስፈልግዎታል።
- ራውተር አይፒ
- ከፍተኛው የሰቀላ ፍጥነት
- ከፍተኛ የማውረድ ፍጥነት
- የእርስዎ WiFi ስም እና የይለፍ ቃል
- በእርስዎ ራውተሮች WAN በይነገጽ ላይ “ውስጠ” እና “ውጭ” የሚሉ ስምንት ነጥቦችን የያዘ OID
ለፈለግነው መረጃ ደረጃውን የጠበቀ OIDs (የነገር መለያዎች) አሉ። በ MIB-2 መስፈርት መሠረት የምንፈልጋቸው ቁጥሮች-
ifInOctets.1.3.6.1.2.1.2.2.1.16. X
ifOutOctets.1.3.6.1.2.1.2.2.1.10. X
ስታቲስቲክስን ለማግኘት ለሚፈልጉት በይነገጽ የተመደበው ቁጥር X የት ነው? ለእኔ ይህ ቁጥር 3. ይህ ለእርስዎ ትክክለኛ OID መሆኑን ለማረጋገጥ እና የትኛውን የበይነገጽ ቁጥር መጠቀም እንደሚፈልጉ ለመለየት ፣ እንደ MIB አሳሽ ያለ መሣሪያን መጠቀም ነው።
ከፍተኛ ፍጥነቶችን ለማግኘት SpeedTest.net ን እጠቀም ነበር። አንዴ ፍጥነቶችዎ በ Mbps ውስጥ አንዴ ይህንን ቀመር በመጠቀም ወደ ኦክቶቶች መለወጥ ያስፈልግዎታል።
ኦክቶቶች በሰከንድ = (በ Mbps * 1048576 ውስጥ ካለው የፍጥነት ሙከራ) / 8
የኮድ ተግባር
ኮዱ የ SNMP የማግኘት ጥያቄን ወደ ራውተር ይልካል። ከዚያ ራውተሩ በቁጥር ይመልሳል ፣ ቁጥሩ የተላኩትን ወይም የተቀበሉትን የኦክቶቶች ብዛት ይወክላል። በተመሳሳይ ጊዜ አርዱinoኖ ከጀመረ በኋላ ያለፉትን ሚሊሰከንዶች ብዛት እንመዘግባለን።
አንዴ ይህ ሂደት ቢያንስ ሁለት ጊዜ ከተከሰተ ይህንን ኮድ በመጠቀም በእኛ ከፍተኛ እሴቶች መሠረት የአጠቃቀም መቶኛን ማስላት እንችላለን
percentDown = ((ተንሳፋፊ) (byteDown - byteDownLast)/(ተንሳፋፊ) (maxDown * ((millis () - timeLast)/1000))) * 100;
ሂሳብ እንደሚከተለው ይፈርሳል
octetsDiff = snmp_result - ቀዳሚ_ snmp_result
timeFrame = currentTime - timeLast
MaxPosableOverTime = (timeFrame * Octets_per_second)/1000
መቶኛ = (octetsDiff / MaxPosableOverTime) * 100
አሁን የኔትወርክ አጠቃቀም መቶኛ ስላለን ወደ መለኪያው መፃፍ አለብን። ይህንን በ 2 ደረጃዎች እናደርጋለን። በመጀመሪያ የዝመናውን ማውረድGauge ተግባር እንጠቀማለን። በዚህ ተግባር ውስጥ መቶኛውን ወደ ልኬት ለመለወጥ “ካርታ” እንጠቀማለን። ከዚያ መርፌውን ወደ አዲሱ ቦታ ለማንቀሳቀስ ያንን ቁጥር ለ setMeterPosition ተግባር እንሰጠዋለን።
ደረጃ 4 የጉዳይ ንድፍ



ሁሉንም ነገር ለመያዝ ፣ በ Fusion360 ውስጥ አንድ ግቢ ዲዛይን አደረግሁ እና በ 3 -ል አሳተመኝ። እኔ የሠራሁት ንድፍ በአንፃራዊነት ቀላል ነው። ክፍሎቹን ወደ ውስጠኛው ለመገጣጠም ሙቅ ማጣበቂያ ተጠቅሜ ልኬቱ ከፊት ሽፋን እና ከኋላ ሽፋን መካከል በመቆንጠጥ ተይ isል። ጉዳዩን ለመፍጠር 3 ዲ ማተምን መጠቀም አያስፈልግዎትም። ለምሳሌ ፣ ከእንጨት ውስጥ አንድ ጉዳይ መሥራት ይችላሉ ፣ ወይም ሁሉንም መለኪያዎች በገቡበት በመጀመሪያው ጉዳይ ላይ ሁሉንም ነገር መልሰው ማስቀመጥ ይችላሉ።
እነሱን ለማየት ከፈለጉ የእኔ STL ፋይሎች በነገር ላይ ይገኛሉ ነገር ግን እኔ የተጠቀምኩባቸውን ተመሳሳይ መለኪያዎች እስካልያዙ ድረስ ለእርስዎ ይሰራሉ ማለት አይቻልም።
የጉዳይ ፋይሎች
ስላነበቡ እናመሰግናለን። ማንኛውም ጥያቄ ካለዎት ያሳውቁኝ እና ለመመለስ የምችለውን ሁሉ አደርጋለሁ።
የሚመከር:
አርዱዲኖን በመጠቀም የሞተር ፍጥነት መለኪያ 6 ደረጃዎች

አርዱዲኖን በመጠቀም የሞተር ፍጥነት መለካት - የሞተር / ደቂቃ ርቀትን መለካት ከባድ ነው ??? አይመስለኝም። አንድ ቀላል መፍትሔ እዚህ አለ። በኪስዎ ውስጥ አንድ የ IR ዳሳሽ እና አርዱinoኖ ብቻ ይህንን ማድረግ ይችላሉ። በዚህ ልጥፍ ውስጥ የ IR ዳሳሹን እና ሀን በመጠቀም ማንኛውንም ሞተር RPM እንዴት እንደሚለካ የሚያብራራ ቀለል ያለ አጋዥ ስልጠና እሰጣለሁ።
የጊዜ መለኪያ (የቴፕ መለኪያ ሰዓት) 5 ደረጃዎች (ከስዕሎች ጋር)
 5 ደረጃዎች (ከስዕሎች ጋር)")
የጊዜ መለኪያ (የቴፕ መለኪያ ሰዓት) - ለዚህ ፕሮጀክት እኛ (አሌክስ ፊኤል እና አና ሊንቶን) የዕለት ተዕለት የመለኪያ መሣሪያ ወስደን ወደ ሰዓት ቀይረነዋል! የመጀመሪያው ዕቅድ ነባር የቴፕ ልኬት በሞተር ማሽከርከር ነበር። ያንን በማድረጋችን አብረን ለመሄድ የራሳችንን ዛጎል መፍጠር ቀላል እንደሚሆን ወስነናል
የበይነመረብ የፍጥነት መለኪያ 9 ደረጃዎች (ከስዕሎች ጋር)
")
የበይነመረብ የፍጥነት መለኪያ - በሕንድ ውስጥ ሙሉ በሙሉ መቆለፊያ በመካሄድ ላይ ፣ የደብዳቤ አገልግሎቶችን ጨምሮ ሁሉም ነገር ተዘግቷል። ምንም አዲስ የፒ.ሲ.ቢ. ፕሮጀክቶች የሉም ፣ አዲስ ክፍሎች የሉም ፣ ምንም የለም! ስለዚህ መሰላቸትን ለማሸነፍ እና እራሴን በሥራ ላይ ለማዋል ፣ ከምቀበላቸው ክፍሎች አንድ ነገር ለማድረግ ወሰንኩ
በመስራት ላይ RC የመኪና ፍጥነት መለኪያ 4 ደረጃዎች (ከስዕሎች ጋር)
")
የሥራ RC መኪና የፍጥነት መለኪያ - ይህ እንደ ቀላል ክብደት ላንድ ሮቨር ትልቅ የ RC ግንባታ አካል የፈጠርሁት አጭር ፕሮጀክት ነው። በዳሽቦርዱ ውስጥ የሥራ ፍጥነት መለኪያ እንዲኖረኝ ወሰንኩ ፣ ግን አንድ አገልጋይ እንደማይቆርጥ አውቃለሁ። አንድ ምክንያታዊ አማራጭ ብቻ ነበር - መ
Yout PC ን እንዴት በከፍተኛ ፍጥነት ማፋጠን እና ያንን ፍጥነት ለስርዓቱ ሕይወት ማቆየት። 9 ደረጃዎች

Yout PC ን እንዴት በከፍተኛ ፍጥነት ማፋጠን እና ያንን ፍጥነት ለስርዓቱ ሕይወት ማቆየት ።: ይህ መጀመሪያ ከገዙበት ጊዜ በበለጠ በፍጥነት እንዲሮጥ ለማድረግ ፒሲን እንዴት ማፅዳት ፣ ማረም እና ማሻሻል ላይ ያደረግሁት ትምህርት ነው። እሱ እና በዚያ መንገድ እንዲቆይ ለመርዳት። እድሉን እንዳገኘሁ ወዲያውኑ ሥዕሎችን እለጥፋለሁ ፣ እንደ አለመታደል ሆኖ አሁን እኔ አላደርግም