ዝርዝር ሁኔታ:
- ደረጃ 1 ለፕሮጀክቱ ቁሳቁሶች
- ደረጃ 2 ክፍል 1 ለሊነር እንቅስቃሴ ለጸሐፊ መፍጠር
- ደረጃ 3 ክፍል 2 ጸሐፊ ራስ (ወደ ላይ እና ታች እንቅስቃሴ)
- ደረጃ 4 ክፍል 3 የወረቀት ሮለር
- ደረጃ 5 ክፍል 4 የብሉቱዝ ሞጁል ውህደት
- ደረጃ 6 ክፍል 5 ሁሉንም ይሰብስቡ
- ደረጃ 7 የወረዳውን ውሱን ያድርጉ
- ደረጃ 8 - ብሬይልን ያትሙ
 8 ደረጃዎች (ከስዕሎች ጋር)")
ቪዲዮ: ቀላል የብሬይል ጸሐፊ (ለብሬል ንግግር) 8 ደረጃዎች (ከስዕሎች ጋር)
 8 ደረጃዎች (ከስዕሎች ጋር)")
2024 ደራሲ ደራሲ: John Day | [email protected]. ለመጨረሻ ጊዜ የተሻሻለው: 2024-01-30 07:33


ሰላም ለሁላችሁ, ይህ ሁሉ የጀመረው በተሳካ ሁኔታ ከጨረሰ በኋላ ቀለል ያለ የ XY ሴራ በመሥራት ፣ ወደ ብሬይል ጽሑፍ መለወጫ ቀለል ያለ ንግግር ለማዳበር አሰብኩ። በመስመር ላይ መፈለግ ጀመርኩ እና ባልተጠበቀ ሁኔታ ዋጋዎቹ በጣም ከፍተኛ ነበሩ ፣ ይህም ትንሽ ተንቀሳቃሽ እና ርካሽ ጸሐፊ ገንብቶኛል።
እኛ ለመገንባት የምናስበው ማንኛውም ነገር ሊኖር ወይም ቢያንስ በአንድ ሰው ሊሞክር እንደሚችል ስለምናውቅ እንዲህ ዓይነቱን የጽሕፈት ማሽን መፈለግ ጀመርኩ። በጣም ትልቅ እና ጫጫታ ያለበት ቪዲዮ አገኘሁ ፣ ስለዚህ የራሴን ጣዕም ለማስቀመጥ አስቤ ነበር። አነስተኛ ተንቀሳቃሽ እና ለመጠቀም ቀላል ነው።
በእውነቱ እኔ ለአርዱዲኖ አዲስ ነኝ እና አሁንም እየተማርኩ ነው። ተስፋዬ በተመሳሳይ ዕውቀት ከፍ ባለ ጊዜ የራሴን ትንሽ የብሬይል ጸሐፊ ለማውጣት እችል ዘንድ በተሳካ ሁኔታ የ XY ሴራ መገንባት ችያለሁ። ስለዚህ በዚህ ሂደት ውስጥ ተምሬያለሁ። ብዙ እና በመጨረሻ በ 2 ሳምንታት ጊዜ ውስጥ ማዳበር ችዬ ነበር።
ስለዚህ እዚህ አንድ ቀላል የብሬይል ጸሐፊ እንዴት እንደሚገነባ ይሄዳል።
ደረጃ 1 ለፕሮጀክቱ ቁሳቁሶች
- አርዱዲኖ ናኖ
- A4988 Stepper ሾፌር
- የብሉቱዝ ተከታታይ አስተላላፊ ሞዱል
- የሲዲ ድራይቭ ስቴፐር ሞተር ተንሸራታች መስመራዊ መመሪያ ማይክሮ
- 2 ቁራጭ 360-ዲግሪ ማሽከርከር servo ሞተር
- 1 ቁራጭ 180 ዲግሪ ሰርቮ ሞተር
- 2 ቁራጭ መርፌ መርፌ (በመድኃኒት መደብር ውስጥ)
- 1 ቁራጭ ግልጽ አክሬሊክስ ሉህ
- ባለ ሁለት ጎን የአረፋ ቴፕ
- ፌቪ ክዊክ
- ወንድ-ሴት ዝላይ ሽቦ
- የመቁረጫ መሳሪያዎች እና የማሽከርከሪያ ስብስብ።
- ጄል / ኳስ ብዕር
- የብሉቱዝ ባህሪ ያለው ተንቀሳቃሽ ስልክ
- APP: አርዱዲኖ የድምፅ ቁጥጥር
አሁን እንገንባው
-
አጠቃላይ ፕሮጀክቱ በ 4 ትናንሽ ክፍሎች ሊከፈል ይችላል
- የሊነር ሞዱል ቅንብር (A4988 ሾፌርን በመጠቀም)
- ለፀሐፊው ራስ ወደ ላይ እና ወደ ታች እንቅስቃሴን መፍጠር
- ሮለር ለወረቀት ማንከባለል
- የብሉቱዝ ውህደት
- በመጨረሻ ፕሮጀክቱን ለማጠናቀቅ የሚያስፈልጉትን ሁሉንም ክፍሎች መሰብሰብ ያስፈልጋል።
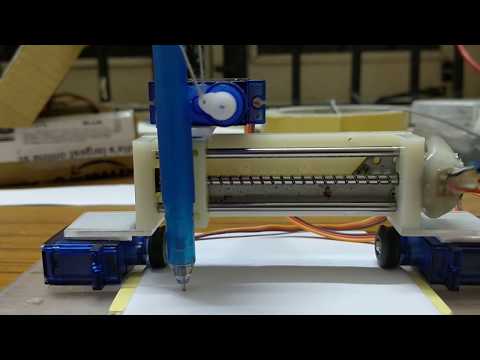
ደረጃ 2 ክፍል 1 ለሊነር እንቅስቃሴ ለጸሐፊ መፍጠር

በወረቀቱ ውስጥ ያሉትን ነገሮች ለመፃፍ እንቅስቃሴን ማዞር አለብን። የተለያዩ ዘዴዎችን በመጠቀም እንዲህ ዓይነቱን ሜካኒካዊ እንቅስቃሴ ለመፍጠር ብዙ ቪዲዮዎች አሉ። ነገር ግን የእርከን ሞተርን በመጠቀም በከፍተኛ ትክክለኛነት በጣም በቀላሉ ልናደርገው እንችላለን።
ስለዚህ ሜካኒካዊ ነገሮችን ከመፍጠር ለማምለጥ በተንሸራታች የሚመጣውን የእግረኛ ሞተር እጠቀማለሁ ፣ እርስዎ እራስዎ መገንባት ይችላሉ ፣ የራስዎን ለመገንባት ፍላጎት ካለዎት ይህንን አገናኝ መከተል ይችላሉ።
የሜካኒካዊው ክፍል ከተጠናቀቀ በኋላ የኤሌክትሪክ ውቅረትን ለማድረግ ደረጃዎችን መከተል አለብን
- ምስሉን ይከተሉ የወረዳ ውቅረት ያድርጉ።
-
ማስቀመጥዎን ያረጋግጡ
- ፒን 6 ፦ አንቃ
- ፒን 5: ደረጃ
- ፒን 4: አቅጣጫ
- በአርዱዲኖ ናኖዎ ውስጥ የመሠረታዊ ሞቭ 2 ኮድ ይስቀሉ እና ተከታታይ ማሳያውን ይክፈቱ እና ለማስተላለፍ እና “ለ” ወደ ኋላ “f” ን ይጠቀሙ እና ወረዳዎን ይፈትሹ። ትክክለኛ የመስመር እንቅስቃሴን ማሳካት ይችላሉ ወይም በትክክለኛነት አይደለም።
- እንዲሁም እንደ ትዕዛዝ እንደ fbfbffbbfffbbb ተከታታይን መጠቀም ይችላሉ።
ደረጃ 3 ክፍል 2 ጸሐፊ ራስ (ወደ ላይ እና ታች እንቅስቃሴ)
")
")
")
")
ወደ ላይ እና ወደ ታች እንቅስቃሴን ለማድረግ የተለያዩ መንገዶች አሉ። የሶላኖይድ አንቀሳቃሹን በመጠቀም ሊያደርጉት ይችላሉ። ነገር ግን እዚህ በሴርቮ ሞተር እርዳታ ቀለል ያለ ብዕር እጠቀምበታለሁ።
- ተንቀሳቃሽ መሙያ ያለው ማንኛውንም ቀላል የኳስ ብዕር ይውሰዱ።
- መሙላቱን ወደ ውስጥ ከገፉ በኋላ ከላይኛው ላይ ቀዳዳ ይፍጠሩ ፣ ቀዳዳዎ በሁለቱም በብዕር በኩል ማለፍ እና እንደገና መሙላት እንዳለበት ያረጋግጡ።
- በመሙያው ውስጥ ሌላ ቀዳዳ ይፍጠሩ እና አንድ ሕብረቁምፊ ያያይዙት።
- መሙላቱን መልሰው ያስቀምጡ ፣ እና ከመገለጫው ቀዳዳ በታች በብዕር ውስጥ ቀዳዳ ይፍጠሩ ከዝርዝሩ ቢያንስ 2-3 ሴ.ሜ ዝቅ ያድርጉት።
- አሁን በላዩ ላይ ተጣጣፊ ላስቲክ በብዕር በኩል ያያይዙ እና ያስተካክሉ።
- የ 180 ዲግሪዎች ሰርቮ ሞተርን ይጠቀሙ ፣ እና ወደ 0 ዲግሪዎች ያዋቅሩት እና ሕብረቁምፊውን ከ nob ጋር ያያይዙት።
- አሁን አንጓው በተቃራኒ ሰዓት 180 ሲሽከረከር ፣ መሙያው ተጎትቶ ወደ 0 ዲግሪ በሚመለስበት ጊዜ በላዩ ላይ ባለው የመለጠጥ ባንድ ምክንያት ወደ ውስጥ ይመለሳል።
- በአርዱዲኖ ናኖ ውስጥ የምልክት ፒኑን ከፒን ቁጥር 8 ጋር ያያይዙ።
- በእርስዎ Arduino nano ውስጥ የመሠረታዊ ሞቭ 2 ኮድ ይስቀሉ እና ተከታታይ ማሳያውን ይክፈቱ እና “n” ን ይጠቀሙ እና ወረዳዎን ይፈትሹ።
- ተከታታይ የ nnnnnnnnn ትዕዛዝን መጠቀም ይችላሉ ፣ እና እየሰራ መሆኑን ወይም አለመሆኑን ያረጋግጡ።
- የፍላጎት እንቅስቃሴን ለማግኘት የመቀነስ ማሽከርከር አንግል ይጨምሩ።
ደረጃ 4 ክፍል 3 የወረቀት ሮለር



አሁን የወረቀት ሮለር ፣ እሱ በጣም አስደሳች እና ፈታኝ ክፍል ነው።
- መርፌ መርፌን ጎማ ያስወግዱ።
- ክበብ ለማድረግ የፕላስቲክ ማርሹን ይቁረጡ።
- በላስቲክ ውስጥ ያስቀምጡት እና አንዳንድ ሙጫ ይተግብሩ።
- ሰርቪውን ያያይዙት እና ሙጫውን ይጠብቁት።
- ከላይ እንደ ሌላ ሌላ ይፍጠሩ።
- በአርዱዲኖ ናኖ ውስጥ የቁጥር 9 እና 10 ን የምልክት ፒን ያያይዙ።
- በእርስዎ Arduino nano ውስጥ የመሠረታዊ ሞቭ 2 ኮድ ይስቀሉ እና ተከታታይ ማሳያ ይከፍቱ እና “p” ን ይጠቀሙ እና ወረዳዎን ይፈትሹ።
- ተከታታይ የ pppppppppp ትዕዛዝን መጠቀም ይችላሉ ፣ እና እየሰራ መሆኑን ወይም አለመሆኑን ያረጋግጡ።
- የሚፈለገውን ፍጥነት ለማግኘት የመቀነስ ማሽከርከር አንግል ይጨምሩ።
- በስርዓቱ ውስጥ ያለውን ፖታቲሞሜትር በመቀየር ፍጥነቱን ለማስተካከል ይሞክሩ።
- መዞሩን በተመሳሳይ አቅጣጫ እና ፍጥነት ያድርጉት (ይህ በጣም አስፈላጊ እና አድካሚ ሥራ ነው)።
ደረጃ 5 ክፍል 4 የብሉቱዝ ሞጁል ውህደት

ይህ ክፍል በጣም ቀላሉ ክፍል ነው።
- ከላይ ያለውን የወረዳ ውቅር ያድርጉ እና ተከናውኗል።
- የአርዱዲኖ ድምጽ መቆጣጠሪያን በመጠቀም የድምፅ ትእዛዝን ለመላክ ይረዳዎታል።
- በ google ውስጥ “አርዱዲኖ ብሉቱዝ ሞዱል hc-05” ን መፈለግ ይችላሉ አሪፍ ምሳሌዎችን ያገኛሉ።
ደረጃ 6 ክፍል 5 ሁሉንም ይሰብስቡ



አሁን አራቱን ክፍሎች እንሰብስብ።
- ሉህ ያፅዱ።
- ድርብ ቴፕ በመጠቀም ፣ በስዕሉ ላይ እንደሚታየው የ servos ሞተር ያክሉ።
- በመስመራዊ ተንሸራታች ላይ ተጨማሪ የፕላስቲክ ቁራጭ ያያይዙ እና በሁለት servos አናት ላይ ያድርጉት።
- ከወረቀት ሮለር ጋር ትይዩ ማድረጉን ያረጋግጡ።
- አሁን የብዕር ጭንቅላቱን ያያይዙ ፣ መሬቱን መንካት እንደሌለበት ያረጋግጡ እና በ servo ሽክርክሪት ላይ በቴፕ ላይ ቀዳዳ መምታት አለበት።
- ፒን አርዱዲኖ ናኖን ያያይዙ።
- በእርስዎ Arduino nano ውስጥ የመሠረታዊ ሞቭ 2 ኮድ ይስቀሉ።
-
ተከታታይ መቆጣጠሪያን ይክፈቱ እና ሁሉንም ትዕዛዞች ያረጋግጡ
- ረ ለማስተላለፍ
- ለ ለኋላ
- p ለወረቀት ማንከባለል
- n ወደ ላይ እና ወደ ታች ብዕር ለማንቀሳቀስ።
- አንዴ ሁሉም ተግባሩ ከተረጋገጠ በኋላ ብሬይል ለማተም ዝግጁ ነው።
ደረጃ 7 የወረዳውን ውሱን ያድርጉ




በትንሽ እና በነጠላ የዳቦ ሰሌዳ ውስጥ ወረዳውን ለመሥራት ምስሉን ያፈስሱ።
ደረጃ 8 - ብሬይልን ያትሙ

- የ Brallie.ino ፋይልን ይክፈቱ ፣ የአርዱዲኖ አይዲኢን ተከታታይ ማሳያ ይክፈቱ።
- ወረቀቱን በሚሽከረከር ወረቀት ሞተር ስር ያድርጉት።
- በትእዛዙ ውስጥ የተወሰነ ቦታ ማለትም ("") ይላኩ እና አስገባን ጠቅ ያድርጉ።
- ወረቀት ወደ ውስጥ ይንሸራተታል።
- የፀሐፊውን ጭንቅላት እስኪያልፍ ድረስ ያድርጉት።
- ከዚያ ትዕዛዝዎን በተቆጣጣሪው ውስጥ ፣ ትክክለኛውን ጽሑፍ መላክ ይችላሉ።
- የብሉቱዝ መተግበሪያን ይክፈቱ እና ከብሉቱዝ ጋር ይገናኙ እና የድምጽ ትዕዛዝ ይላኩ።
- የብሬይል ቋንቋን ለማየት ወረቀቱን ይገለብጡ።
- እንደ ሠላም ፣ ሰላምታ እና እንኳን ደህና መጡ ያሉ ጥቂት ቃላትን ሞክሬያለሁ ፣ የናሙናውን የውጤት ወረቀት ማየት ይችላሉ።
-
ለእርስዎ የተወሰኑ ውጤቶችን ለማግኘት በኮዱ ውስጥ ከዚህ በታች ያሉትን መለኪያዎች መለወጥ ይችላሉ።
- በብሬይል አምዶች መካከል ክፍተት: int ደረጃዎች = 30;
- በብሬይል የመጀመሪያዎቹ ሁለት ነጥቦች ወደ ቀጣዩ ሁለት ነጥብ ረድፎች መካከል ያለው የመስመር ክፍተት - int paperLine = 250;
- መስመራዊ ተንሸራታች ፍጥነት - int stepperDelay = 500;
- የጸሐፊ ራስ ፍጥነት - int servodelay = 500;
- በአንድ መስመር የቁምፊ ብዛት int n = 10;
የሚመከር:
የአርዱዲኖ ሞርስ ኮድ ጸሐፊ - 7 ደረጃዎች (ከስዕሎች ጋር)
")
አርዱዲኖ ሞርስ ኮድ ጸሐፊ - ማንኛውንም የተሰጠውን ጽሑፍ ወደ ሞርስ ኮድ መለወጥ የሚችል እና ከዚያ በኋላ ሊጽፍ የሚችል ሮቦት ሠራሁ !! እሱ ከካርቶን እና ከሊጎ የተሰራ እና ለኤሌክትሮኒክስ እኔ አርዱዲኖን እና ሁለት ሞተሮችን ብቻ እጠቀም ነበር
የ NFC አንባቢ/ጸሐፊ እና የኦዲዮ መቅጃ ለዓይነ ስውራን ፣ ማየት ለተሳናቸው እና ለሌሎች ሰዎች ሁሉ ይቃኙ 4 ደረጃዎች (ከስዕሎች ጋር)
")
ScanUp NFC Reader/ጸሐፊ እና የኦዲዮ መቅጃ ለዓይነ ስውራን ፣ ማየት ለተሳናቸው እና ለሁሉም ሰው ሌላ - የኢንዱስትሪ ዲዛይን አጠናለሁ እና ፕሮጀክቱ የእኔ ሴሜስተር ሥራ ነው። ዓላማው በ SD ካርድ ላይ በኤ.ዋቪ ቅርጸት ድምጽ ለመቅረጽ እና ያንን መረጃ በ NFC መለያ ለመደወል በሚያስችል መሣሪያ ማየት የተሳናቸው እና ማየት የተሳናቸው ሰዎችን በመሣሪያ መደገፍ ነው። ስለዚህ ውስጥ
የብሬይል አስትሮኖሚ 8 ደረጃዎች (ከስዕሎች ጋር)
")
የብሬይል አስትሮኖሚ - የዓይነ ስውራን / አስትሮፎግራፊ ዓለምን ለዓይነ ስውራን እና በደንብ ለሚያዩ ሰዎች ማካፈል ፈልጌ ነበር። ይህ ፕሮጀክት በጥቂት አቅርቦቶች እና ርካሽ በሆነ ቀለል ባለ ሁኔታ ያንን ያደርጋል
ርካሽ የብሬይል ኤምቦሰር (ላ ፒክሬውስ) 19 ደረጃዎች (ከስዕሎች ጋር)
 19 ደረጃዎች (ከስዕሎች ጋር)")
ርካሽ የብሬይል ኤምቦሰር (ላ Picoreuse) - ማቅረቢያ " ላ Picoreuse " ርካሽ ነው (75 &ዩሮ;) ፣ በቀላሉ የ A4 ብሬይል ኢምሶሰርን ለመገንባት ይህ ፕሮጀክት በጣም ውድ ለሆኑ የገበያ አምሳያዎች አማራጭን ለመስጠት እንደ መጀመሪያ ደረጃ ወይም ለሌሎች ሰሪዎች ነፀብራቅ መሠረት ሆኖ ለማገልገል ያለመ ነው
ንግግር ወደ ንግግር Bullhorn: 4 ደረጃዎች

ለንግግር ቡልሆርን ጽሑፍ - መስማት ለተሳነው ጓደኛዬ ለንግግር ጉልበተኛ ውጤታማ ጽሑፍ ለማድረግ ይህ ቀላሉ መንገድ ነው። ምክንያት ፣ ታውቃለህ ፣ የበለጠ ራድ ያደርጋቸዋል። በተለይ አጥጋቢ ወይም ትምህርታዊ የግንባታ ፕሮጀክት አይደለም ፣ እና አንዳንድ እንዲገዙ ይጠይቃል